944
前言
现代计算机的出现,使自动驾驶进入了新纪元。其意义,不亚于人类开始使用青铜器。这几十年,自动驾驶技术的推进离不开国家政府的支持。出于技术储备和战略需要,日本、美国、欧洲相继布局。
“石器时代”的自动驾驶技术,注定不会成功。无线电明显不足以支撑如此复杂的工程,在新的技术出现之前,再多、再华丽的想象,无非就是空中楼阁而已。
这一困境,在1970年代得到了改变——现代计算机来了。
现代计算机有着神奇的魔力:每两年性能翻一倍,价格降一半。这种疯狂的进化方式,推动了无数领域的进步。其中,就有自动驾驶的两大技术基石:计算机视觉、人工智能。
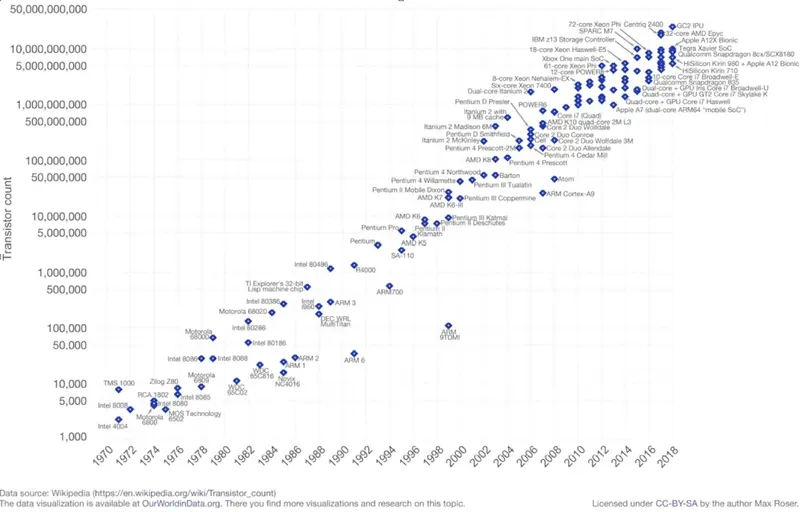 CPU进化史
CPU进化史
#1
日本:我要创新,我要当第一
1973年,第一次石油危机终结了日本的经济奇迹。为了应对国际竞争,日本开始将汽车、半导体列为主导产业,向技术性产业转型。
政府支持之下,大量资金和政策进入高新技术领域。70年代末,日本基本摆脱了石油危机的影响,汽车成为了世界品牌,占据了近五分之一的市场。
天时、地利、人和造就了自动驾驶研发土壤。1977年,日本通产省(现经产省,相当于我国的工信部)麾下的机械工程实验室,组装了一台具备障碍躲避能力的自动驾驶试验车。这是现代意义上的第一辆自动驾驶乘用车。
 机械工程实验室自动驾驶车辆
机械工程实验室自动驾驶车辆
道路识别单元和决策单元构成了整套自动驾驶系统。
道路识别单元包括两个摄像机、一个信号处理器。两个摄像机对称放置在车头,采集的视频信息,经过视频信号处理器后,输出道路特征信息,以供后续决策单元使用。
据相关论文介绍,摄像机的识别范围为5-10米,视角为40度。扫描一次时间为33毫秒,视频信号处理时间为2.3毫秒。计算机视觉第一次用在了自动驾驶领域。
决策单元本质上就是一台微型计算机,主要职责是根据输入道路特征信息提供车辆控制策略(转向、刹车、加速)。这台计算机内存只有8K,ROM(存储器)只有3K。
决策算法很简单,ROM中预置256种场景,根据传入的信号值,像查字典一样查找控制策略。
凭借摄像机与微型计算机,试验车可以在每小时30公里的速度下无人自动行驶。
#2
美国DARPA:卧榻之侧,岂容他人鼾睡
日本信息技术的突飞猛进,尤其是大张旗鼓的“第五代计算机计划”,引起了美国政府的警觉。
为了保持美国信息技术领先的地位,1983年,DARPA(国防高级研究计划局,原ARPA,互联网正源自这个机构)启动了战略计算计划(Strategic Computing Initiative,后文简称SCI),预计投入10亿美元。
简单来说,这个计划是以人工智能为核心,分别为海军、陆军、空军研发三套军用产品。其中,针对陆军的产品为自主陆行车(Autonomous Land Vehicle,ALV),即军用自动驾驶车辆。
战略计算计划——SCI
SCI的立项充满故事性。那个年代,计算机领域的资金大户是DARPA。科学家们为了能够从DARPA拿到更多的经费发展人工智能技术(更具体的说,是专家系统),借第五代计算机之势,大谈日本威胁论。
但是,DARPA组建的专家团队去日本考察后,发现事实并非如此。日本的技术发展路线有诸多不合理之处,短时间内并不会对美国构成威胁。
然而,专家团队实在不忍心放弃如此难得的发展机遇,为获取研发经费,彼此心照不宣,马不停蹄地筹划方案。最终,整份方案以SCI命名后,提交给了国会。
那年,还有另外一份方案等待国会批准——SDI(战略防御计划,也称为星球大战计划)。这些科学家为了能够推进该项目,命名上都下足了功夫。SDI针对苏联,SCI遏制日本(名义上),很符合里根政府的风格。
1983年10月,DARPA宣布启动SCI。
对于此类项目,DARPA采用的是外包制。经过一系列的招投标过程,确定承包商后,DARPA提供资金和项目经理,共同推动项目进度。项目经理除了提需求、控制进度之外,也会深度参与到项目过程当中,有绝对的控制权。
宣布启动SCI 9个多月后,DARPA才确定将ALV项目交给马丁·玛丽埃塔公司推进,马里兰大学提供软件支持。两月后,卡内基梅隆大学也加入了进来。
马丁·玛丽埃塔公司有远程控制技术的研发经验,马里兰大学当时正在开发计算机视觉系统,而卡内基梅隆大学已经有自动驾驶测试车。这个组合目标性很明显,ALV基于视觉技术实现自动驾驶。
DARPA对项目组提出了两个目标:1. ALV能够根据地形特征、地标自主导航,可以识别障碍物并躲避;2. 1985年车速达到10公里/小时,1990年达到80公里/小时。
DARPA专家分析,60公里/小时的速度下,ALV运算速度需要达到每秒10~1000亿条指令(1~100GOPS),而1983年计算机也就停留在30~4000万条的水平。随着车速的增加,运算速度也需要成比例增加。
虽然不能说绝无可能实现,但难度非常非常大。
转眼,首次检验成果的日子来临。DARPA将第一次演示时间定在1985年5月,这也是国会举行预算听证会的日子。
由于只给了6个月的准备时间,马丁·玛丽埃塔公司和马里兰大学为应对演示,采用已有技术拼凑了一辆试验车。
车正面安装了一个采用CCD传感器的摄像头,用来采集视频信息;VICOM图像处理器识别环境特征;车载英特尔的单板机负责运算。演示还算成功,平均3.6公里/小时的速度,行驶了870米。
ALV
演示成功后,ALV项目开始加速。即使是SCI项目核心领导的离开,都没有影响研发进程。
1985年11月,激光雷达被用在了ALV上,用于识别障碍物特征。1987年,ALV完成了越野测试,能够轻松绕过沟壑、灌木丛、石头和陡坡。道路测试中,ALV最高时速达到了20公里/小时,能以8公里/小时的速度绕过垃圾桶。从数据上看,ALV似乎完成DARPA的两项要求。
但就在这时,DARPA专家组对ALV产生了质疑:东拼西凑一堆零件,只是为了完成演示,没有实际应用意义。
军方在看到ALV后,也直呼好家伙,这么大、那么慢、还涂成了白色,上了战场,这不活靶子嘛。
ALV,卒。
ALV
整个SCI计划中,卡内基梅隆大学恐怕是最大的赢家。它逐步替代了马里兰大学,成为了软件系统的主力。与此同时,他们也在独立发展自己的自动驾驶车辆——NAVlab。
ALV项目结束后,卡内基梅隆大学继续改项目。1989年,他们引入了神经网络技术(也是目前自动驾驶用得最多的技术)。90年代,卡内基梅隆大学赢得了军方的认可,拿到了国防部的经费。
NAVlab
#3
欧洲尤里卡:你们这自主爬行车,我们不要
美国与日本的竞争如火如荼,欧洲也坐不住了。1987年,为了应对日本和美国,尤里卡开始了普罗米修斯项目。尤里卡是欧洲的政府间组织,欧盟国家都是成员。
普罗米修斯项目获得了7.49 亿欧元投资,涵盖了从辅助驾驶到智能交通的一系列子项目。相比DARPA的SCI,目标非常清晰,规划井井有条,特别德国范儿。
慕尼黑联邦国防军大学、戴姆勒奔驰、宝马、沃尔沃、大众、博世等超过200家机构及企业直接或间接参与了该项目。
普罗米修斯项目
整个项目最核心的人物是慕尼黑联邦国防军大学的恩斯特·迪克曼斯。
在普罗米修斯项目启动前,迪克曼斯就和戴姆勒奔驰合作研发自动驾驶车辆了,在1987年推出了VaMoRs。VaMoRs采用纯视觉方案,最高速度达到了96公里/小时,各项技术指标大大超过了ALV。
迪克曼斯老爷子在2010年的采访中,忍不住说ALV 和 NAVlab是在爬行。
普罗米修斯由戴姆勒一手推动,后续的测试车也都是奔驰。迪克曼斯顺势成为项目的核心人物。借着VaMoRs的功绩,迪克曼斯成功说服项目组,放弃了高速公路埋电缆的技术方案。
VaMoRs
视觉系统,成为了普罗米修斯最大的亮点。
两台奔驰S500配置了这套视觉系统,分别被称为VaMP、VITA-2,在1994年,跑出了130公里/小时的速度,总里程上千公里。现在看来,这个成绩也是非常不可思议的。
VaMP
支撑VaMP背后的技术是4D模型,换句话说,就是动态3D对象分析技术。
当然,视觉技术并非完美。迪克曼斯团队依靠视觉算法虽然解决了很多问题,但是面对负障碍物(例如水坑)也束手无策。视觉系统无法分辨10厘米深水坑和1米水坑,这时候需要激光雷达进行辅助。
正如卡内基梅隆大学开发NAVlab那样,单一的感知系统无法识别所有的道路情况,也不存在完美通用的纯视觉驾驶方案。
即便是这样,这套4D系统似乎比如今一些已经商用化的视觉方案还要成熟。
VaMP摄像头画面:CAM1 长焦;CAM2 超长焦;CAM3,CAM4 广角
不像SCI项目那样提前终止,普罗米修斯是寿终正寝。1995年,按照计划,停止了该项目。而戴姆勒奔驰继续沿着这条路独立前进。
从日本的图形信号,到ALV的图像识别,再到普罗米修斯的动态3D,现代计算机诞生后,自动驾驶技术一路高歌。自动驾驶有了计算机,相当于人类学会了使用金属,从此进入了新纪元。
在自动驾驶的“青铜时代”,技术研究都有政府背景,目的也更多的是技术储备,而非商品化。技术成熟到一定程度,商品化是必然出路。于是,自动驾驶开始往铁器时代挺进。
内容由作者提供,不代表易车立场






