834
谁在遥遥领先?
如果说燃油车时代,发动机的功率、扭矩、零百加速,最能激发消费者购买激情,那么来到电动车时代,智能化或许会成长为最核心的标签。
厂家也发现了这一点,在赋予车型定位时,少不得“智能”二字。从今年的发展趋势来看,城市NOA已经成为了“香饽饽”,一些厂家在新车发布时,除了公布价格之外,最大的看点就是城市NOA的技术进展和开城时间。

有数据显示,2022年我国前装标配搭载NOA的乘用车交付量为21.22万辆,占组合驾驶辅助产品搭载总量的比例为1.06%;2023年上半年,前装标配交付量已达到20.94万辆,实现同比倍增,预计全年有望突破50万辆。
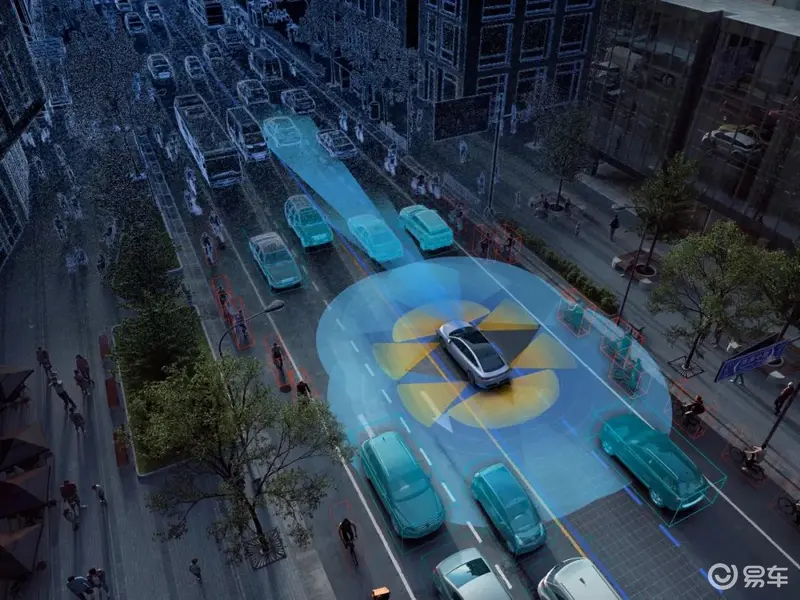
NOA的实现主要依托感知技术。目前感知主要分为两个部分,一个是特斯拉采用的纯视觉感知,另外一种就是多传感器融合的方案,也是目前国内厂家主要采取的方案。
在多传感器融合的方案中,挑战在于,不同传感器收集到的数据类型、坐标系维度不同。比如,摄像头获得的视觉数据属于2D图像空间,而激光雷达收集到的点云数据则是3D空间。
如何有效地处理与融合这些数据,成为了感知环节必须应对的问题。
★ 前融合、中融合、后融合
目前主要有前融合、中融合、后融合三种方式,主流方案大多为后融合。
后融合:每种传感器都有自己算法,各自处理生成目标数据,当所有的传感器生成目标数据,并且时间同步后,就可进行数据融合。
后融合算法典型结构(信息来源:CSDN)
后融合的优点是解耦性好,且各传感器可以互为冗余备份。但缺点也很明显,由于后融合是基于规则处理的,会受到先验思路(从结果推向过程)限制,并且传感器各自对目标识别后再融合,中间也损失了很多有效信息,对感知精度也会造成影响。
图:前融合算法典型结构(信息来源:CSDN)
前融合,是指把各传感器的数据采集后,经过数据同步,对这些原始数据进行融合。
更早的进行数据融合,降低了数据损失的可能。但由于视觉数据和激光雷达点云数据所处坐标维度不同,所以融合起来难度很大,需要建立精准的雷达坐标系、三维世界坐标系、摄像头坐标系等等,同时对平台算力提出了很高要求。
图:中融合算法典型结构(信息来源:CSDN)
再聊一下中融合。
中融合,也称为特征级融合:先分别从传感器的原始数据中获取有效的特征数据,再将有效特征融合,特征信息包括边缘、方向、速度、形状等。数据损失没后融合那么多,算力消耗也没前融合那么庞杂。
★BEV+Transformer,为数据融合按下快捷按钮
有没有发现,无论是中融合,还是后融合,都需面临一道关卡,那就是异构数据带来的坐标系转换。开发人员为了解决这个问题,往往是将摄像头的2D信息转换为3D。
这也就引进了一种全新的3D坐标系——BEV
鸟瞰视角(Bird''s Eye View,简称BEV)是一种从上方观看对象或场景的视角,就像鸟在空中俯视地面一样。在自动驾驶和机器人领域,通过传感器(如LiDAR和摄像头)获取的数据通常会被转换成BEV来表示,以便更好地进行物体检测、路径规划等任务。
传统的摄像头采用的是“透视原理”,会出现遮挡、掩盖等现象,而BEV视角就像日常用车时使用的360°全景倒车影像,看的清清楚楚,且没有遮挡。
此外,BEV空间内的感知任务,在精度上也有优势。
摄像头是不具备深度信息的,采取2D感知时,面对远处的物体,很难做到精确距离的识别,但在BEV空间内训练模型,感知结果会更加准确,同时还能很好地应对Corner Case, 如复杂道路状况、狭窄或遮挡的道路等。
但问题还是有,摄像头和激光雷在识别时,都以时间上断续的帧为单元,并没有设计跨越时间尺度、Frame by frame的时域网络,这也就导致了其没办法完全利用时序上的有用信息。
这两年,随着AI深度学习的兴起,Transformer被应用在BEV空间转换、时间序列上,形成了一个端到端的模型。
Transformer强调注意力法则,在意数据之间的内在结构和相互关系,用于提取多模态数据中的特征,从而有效地识别和定位环境中的障碍物。
有这么一个比喻,引入Transformer后,就像做饭请了一位资深的厨师,他就站在旁边看着你做饭,告诉你各种流程,具体根据你要做的菜品,指导你分配不同比例的油盐酱醋,从而端上来一份美味佳肴。
BEV+Transformer最早由特斯拉提出,今年以来,国内的新势力和供应商也纷纷开始进军BEV,比如蔚来、理想、小鹏、毫末智行、小马智行等等。
再往后,Occupancy占用网络也会被逐渐加进来,BEV还是要从数据库中比对识别障碍物之后,才能完成跟踪,但占用网络将障碍物3D栅格化,哪怕不知道这个障碍物到底是什么,也能识别出这是个需要规避的障碍物。
今年,华为问界,小鹏G6的火爆,让市场看到了智驾对用户的吸引力,以及新的增长点。对于算法的更新,各家的工程团队已经在快马加鞭了,就看谁家可以将这些新的技术最快落地。
★写在最后
根据手机等电子行业和新能源自身的发展来看,新型事物的发展基本是走S型曲线,渗透率会经历由慢到快,再到慢的过程。
有些消费者存疑的功能,在等到一个时机之后,就会进入“忽如一夜春风来” 遍地开花的阶段。如今,正是智驾大规模普及的前夜。
但技术的积累并非一朝一夕就能完成。这时候,好的产品定义,战略目标就显得非常重要。当下汽车环境非常躁动,很多汽车从业人员都直呼很卷,越是这个时刻,越是考验主机厂的谋略布局。毕竟,谁踩中了用户新一轮的需求,谁就能在接下来的市场中站稳脚跟。
本文作者为踢车帮 晞贝
内容由作者提供,不代表易车立场






