1405
随着L2高阶辅助驾驶进入深水区,战场也从之前的封闭高速路,切换到了城市场景。2023年不卷城市NOA(导航辅助驾驶)、不卷无图(无高精地图)方案,你无法证明自己的领先性。
而这场战火的源头,还是特斯拉!
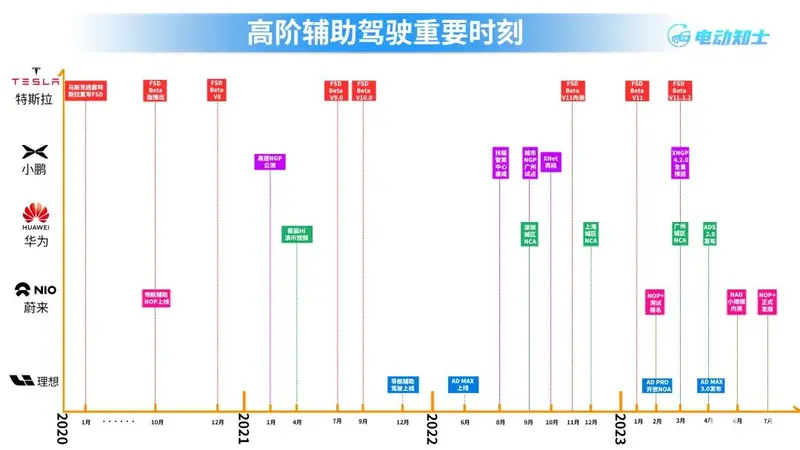
2020年1月,马斯克就曾公开表示:特斯拉将重写FSD代码,以便能实现真正的自动驾驶。
同年10月22日,特斯拉将首个FSD beta内测版本,推给了早鸟用户(Early Access ),但实际表现并不理想。马斯克也不得不承认,自动驾驶比想象中难得多。

2022年11月12日,特斯拉正式向「内部员工」推送了FSD beta V11版本。
2023年3月19日,多次跳票的V11.3.2正式大规模推送,这也被看作FSD beta 真正走向「成熟」的标志。
按照测试者的说法:这是迄今为止最为稳定的版本,非常接近真正的自动驾驶。
这长达878天的时间里,特斯拉完成了BEV动态、静态网络的搭建,落地了Occupancy networks(占用网络),统一了城市和高速的技术栈,并将这套软件推送给了40万+的用户使用。
特斯拉的FSD beta 没有使用高精地图,未搭载激光雷达!
*由于各家对于城市领航使用了不同的叫法,为方便理解,本文将功能均称为城市NOA
小鹏抢先落地CNGP
大洋彼岸,小鹏汽车在2021年的1024科技大会上邀请核心媒体,试乘了城市NGP(以下均简称CNGP)的第一个版本。
在这全长15公里,穿行于广州闹市区的行程中。P5激光雷达版的表现,略显稚嫩,我体验的过程中,有过2-3次接管,但整体跑了下来。
这也是我本人,第一次体验量产车的城市NOA,当时的感受是:小鹏的胆子真大!
这段路包括了15条斑马线、10个红绿灯路口、7处汇流、3个施工路段,还包括了无保护左转,以及大量的人车混行路段。能跑下来就已经超出了我的预期。
毕竟,P5并没有很强的硬件。其辅助驾驶芯片,是只有30TOPS算力的英伟达Xavier,这台车同时搭载了两颗来自Livox的激光雷达,并使用了高精地图。
2022年7月,我们再次受邀,参加CNGP的内测活动,与一年前不同的是,我坐在了驾驶位,能更真实感受它的能力。
而这一次,小鹏不在限定路线,而是允许我们自己定制导航点,广州城区的大部分道路都能跑。
经过一天的高强度试驾,我对这个版本的CNGP非常满意,相比一年前的试乘,P5表现的更像“老司机”。虽然还是存在少数接管的情况,但对我个人来说完全可用。
我甚至幻想着不久之后,可以用CNGP帮我开上下班的路。
在我眼里,7月的这版简单打磨一下,就可以发版推送了。但直到2022年的9月17日,小鹏才正式官宣CNGP落地广州。
问题还是出在了高精地图的过审上,虽然小鹏是广州本地企业,但难度依然很大。
2021年末,我与某位行业大佬交流时,对方就讲述过:城市高精地图过审的难度,想要过审50个城市,至少要花5-10年才有可能。
就在我试乘CNGP的那个时间点,小鹏的另一个团队开始基于Transfomers开发全新的BEV框架。
36氪曾爆料:2021年下半年小鹏开始了BEV框架搭建。而据我所知,项目启动时间其实更早,2021年初,小鹏就已经动手了。
这也打破了互联网上,关于特斯拉开源BEV代码,中国品牌才会进展迅速的谣言。
毕竟在2021年上半年,特斯拉还未发布FSD beta V9版本,BEV框架也处于雏形阶段,展示出来的界面可以用“灵魂画手”形容,在工程落地还不完美的情况下,没有哪个厂商会去开源代码。
2023年3月31日,小鹏全量推送XNGP(全场景辅助驾驶)4.2.0版本,所有G9 MAX和P7i MAX用户,都能获得这个软件版本。
XNGP可以理解为:小鹏基于BEV框架重写的辅助驾驶系统,其能力与特斯拉FSD Beta类似。
小鹏将自己的BEV深度神经网络,称作XNet。它已经具备了动态交通参与者、静态道路的网络化输出、自标注、自学习能力,可以不依赖高精地图,同时它还能告知车辆可达空间。
只不过在4.2.0版本下,感知部分虽然全部切换到了BEV,但后台还会跑着高精地图。所以CNGP功能,只落地了广深沪三座城市,基于BEV的LCC-L(LCC增强版),则全部城市落地。
按照小鹏的定义,后台的图可以跑高精度图,也可以无图,只依靠SD导航地图。这种方式,具备更好的冗余度。
XNGP运行时,会实时对比高精地图、自车定位和视觉输出的静态网络,当高精地图“出错”时,会由实时感知无缝切换。
小鹏会在下个大版本,完成城市与高速的技术栈统一,使用同一套框架,类似FSD Beta V11.3.2的能力。
小鹏自动驾驶副总裁 吴新宙提到:2022年“1024科技日”之后,软件迭代了三百多版,这其中仿真训练的中后台能力功不可没。
2022年8月,小鹏汽车与阿里云共同打造的智算中心「扶摇」落地,其算力可达600 PFLOPS,让自动驾驶模型训练提速170倍。
有人把「扶摇」比作小鹏版的Dojo。
何小鹏说:到2025年,小鹏每年花在算力上的钱,将超过10亿人民币。此时,美国芯片法案还未出炉,很多人看不懂,事后再看扶摇落地的时间点,简直是太明智了!
截止到本文发稿前,小鹏官方尚未公布无图方案的时间表。坊间传闻:小鹏今年的目标是落地50+城市。
而与小鹏的低调不同,余承东在上海车展前宣布:华为ADS2.0的无图方案,年内要落地45城。
华为高调发布ADS2.0
华为的城市NOA之路,可谓一波三折。
2021年的上海车展,一段华为城市NCA的演示视频,火爆全网。这辆极狐阿尔法S Hi版,在上海街头完成了无保护左转、人车混行等复杂环境下的自动驾驶,让人们对于华为的高阶智驾方案,有了极高的期待。
但直到2022年7月,极狐阿尔法S Hi版才正式交车。9月24日,极狐和华为共同宣布,城市NCA功能首发落地深圳,比小鹏的CNGP晚了一周,没能抢到这个中国第一。
12月4日,华为城市NCA落地上海,2023年3月22日,落地广州。除了极狐,另一套Hi方案的阿维塔11,也在同步落地。
我们曾深度体验过阿维塔11的城市NCA,它的感知、预测能力给我留下了极为深刻的印象。与小鹏的CNGP相比,能力不分伯仲。甚至在某些场景下,表现更为出色。
如果以当下这个时间点,对综合体验进行排名。我会把华为和小鹏并列第一。
相较于出色的Hi车型,华为智选车问界的辅助驾驶能力,却被广泛吐槽。供应商只给了一套基础的L2方案,能力上限还很低。而问界对于华为终端极为重要,承载了爆款的任务。
所以业内有人评价:ADS2.0是为问界量身打造的一套系统。
为了控制成本,满足问界的定价区间。ADS2.0从此前最多的三激光雷达方案,变成了单激光也能跑,所需的算力也从最高的400TOPS,下降到了200TOPS。
余承东在4月16日的发布会上宣布:ADS2.0将在二季度完成广州、深圳、上海、重庆、杭州,五座城市落地,会使用高精地图。而无图版本,三季度会落地15城、四季度落地45城。
而我之前得到的消息是:无图方案四季度才能落地。显然余承东对这个时间点不认可,华为内部加速了。
华为的官宣,在行业里激起了千层浪,并加速了城市NOA的内卷。大家都感叹:华子真强,还得是华子!
某行业大佬告诉我:从高精地图切换到无图的过渡方案,需要做大量的ODD测试,只要能跑通,应该就能开。
所谓ODD(Operational Design Domain)测试,可以理解为系统开启条件的工况测试,包括什么条件能够运行,什么节点下会退出。
ODD测试涵盖了多个层级,一般会包括:道路、交通设施、 施工(人为因素)变化、交通参与者、气候环境、通信、自车状态 等等。
而无高精地图的难点,需要跑通前三个层级。
其实,行业里所谓的无图方面,并非完全不用地图,不是装个“高德”导航就解决了。大多数厂商,还会先从图商拿到SD底图,再用自己的测试车去跑,来打「标签」。
SD底图,只包括低维信息,比如:车道数量,路口位置这一类。不包括车道线宽度、道路边界、曲率等高精度信息,所以没办法拿来直接用。这也是无图方案要逐个城市开放的原因。
而开放速度,也取决于你打标签、做ODD测试的质量和速度。
华为激起了内卷,有人跟进了。
理想汽车,2023年落地100城
4月18日的上海车展媒体日,理想汽车放了个大招。宣布已具备了BEV动态、静态网络和占用网络能力,并将于年底之前,开通100座城市的无图城市NOA方案,同时宣布终身免费。
这也意味着,只要你购买了理想L9、L8、L7的AD MAX版本,就能获得这个功能,我的微博和朋友圈瞬间就被刷屏了。
4月17日就有朋友提前透露了理想准备炸场的消息。因为郎咸朋和赵哲伦从北京火速飞到了上海。 而我原计划的专访对象,也被换成了理想汽车智能驾驶副总裁 郎咸朋,智能驾驶产品负责人 赵哲伦。
时间回到2022年6月29日,理想L9发布次日的媒体培训会上。郎咸朋讲解的PPT里,赫然出现了BEV融合几个大字。
此后,李想在多个场合接受媒体采访时,都提到了与清华大学、MIT联合研发了混合式BEV算法框架,可以实时构建高精地图,供智能驾驶规控使用。
李想提到的清华大学就是MARS Lab课题组。该课题组的负责人赵行,是行业知名的AI专家,毕业于MIT,2019年加入Waymo担任研究科学家,回国后加入清华大学,牵头创立了MARS Lab,并提出了“以视觉为中心的自动驾驶VCAD”方案。
2022年7月15日,李想在微博上写到:智能驾驶自研团队,实现了全世界第一个在量产车上的BEV 视觉感知算法和激光雷达的前融合能力。随后MARS Lab在知乎的一篇文章中提到:在其中做了一些工作。
从此,MARS Lab走入了我的视野。 2022年下半年开始,赵行多次在TechBeat社区分享VCAD的进展,包括了:
你会发现,这些几乎涵盖了BEV框架下所有技术实现原理。而MARS Lab课题组的方案,在各类AI算法大赛中,都拿到了非常不错的成绩。
所以理想汽车联合MARS Lab自研的这套BEV算法框架,在行业内绝对是一流水准,而难点在于,如何把它工程化落地。
落地100座城市,是不是吹牛了?这是很多人心中的疑问!
按照前文所讲:打标签的质量、ODD的测试速度,是决定开放城市数量的天花板。
而关于开放城市的顺序和要求。郎咸朋指出:理想的逻辑是数据驱动,取决于不同城市车的保有量和里程,这个城市的数据量大、需求量大,就会更早被开放出来。
而开放城市的这个问题,我也曾问过某位行业大佬。他告诉我:依靠用户保有量和用户车队,会遇到「地图缺失」的问题。
因为你无法决定用户的行车轨迹,有些地方用户跑得多,数据就会很好,但用户不去的地方,就没有数据。所以前期必须靠自己的车队和测试车。因为可控,能制定详细的规划,更高效,覆盖也会更全面。
其实郎咸朋和大佬讲的,是一件事的两个不同阶段,大佬说的是从0到1,用自己的车队一定是最高效的。而此后的能力进化,则离不开体量更大的用户车队,是1到10的过程。
量产后才会“吹”的蔚来
上海车展蔚来展台的一角,孤独的停放着一辆EC7。旁边的大屏里,播放着通过BEV捕捉到的实时画面。
红色的占据栅格代表激光雷达扫到的目标,蓝色则代表纯视觉感知到的行人,通过行人的动作,还能预测出运动轨迹。
时间回到2022年的NIO DAY上,李斌在舞台上展示了一段NOP+领航换电的视频,视频中的这辆ET7车机上,出现了一套从未见过的工程画面,里面也使用了占据栅格。
以上两个内容,我都在第一时间制作了视频,并把他们称作蔚来的「占用网络」。
但这个观点,也引来了大量的质疑!很多人认为,基于激光雷达采集而生成的栅格,不能称之为Occupancy占用网络。
而有关于这一点,我在微博里详细解释了自己的观点,有兴趣的同学,可以移步到我的微博。
我曾问过蔚来的同学:这两段「占用网络」内容,完全可以吹一吹,结果你们是藏着、掖着,等着媒体自己去发现,是不是有点傻?
他提到,蔚来一向的风格,就是「能落地」才会讲。换电站的发布、迭代如此,领航辅助NOP也是如此。
蔚来是首个落地高速NOA的自主品牌,蔚来叫做领航辅助NOP。
2020年10月10日,NOP以OTA的方式,推送给了所有选装大NP包的866车型。这在当时,被视为一大创举。毕竟NT1平台的感知能力,全部来自于一颗Mobileye Q4,仅有2.5TOPS算力。
时至今日,NT1平台的NOP功能,还在通过OTA的方式迭代,至今已升级14次。
NOP+ beta版,是NT2平台的高速领航功能,目前还在全量免费试用。蔚来是除特斯拉之外,全系标配同一套辅助驾驶硬件的品牌。
NT2平台用了4颗英伟达Orin X,算力达到了1016TOPS,标配图达通1550nm激光雷达。32万的ET5和63万的ES8,都使用了同一套硬件。
李斌讲过蔚来的逻辑:首先是硬件的前瞻性,后期发现不够用,没法补,要保证天花板足够高;其次是研发、维护,数据闭环、一套平台最简单。最后是全栈自研的迭代与进化,从感知到规控,从车端到云端,以及后续的数据运营,一套平台最合理。
从NT2平台开始,蔚来把NP的软件功能,免费提供给用户。而NOP+则采用订阅收费的方式,7月1日NOP+将拿掉beta的尾巴,正式发版。蔚来也将成为国内首个通过订阅方式,对辅助驾驶进行收费的品牌。
订阅收费模式,引来了外界的“口水”。但蔚来的车主们,却反应平淡。因为从政策上来看,老车主几乎是免费使用。
5月31日之前提车的NT2用户,有两年的免费使用权。而买过NT1大小包的用户,再购入新车,最多能拿到12年和7年的免费权益。
与特斯拉、小鹏先做城区、再做高速的方式不同,蔚来先选了高速。
任少卿在2022年12月第一次与媒体见面时,解释了蔚来的逻辑:NOP+不是NP的延伸、也不是NT1对NOP的定义,而是作为全栈点到点方案,往更高级别驾驶体验的一个起点。NOP+是NAD的起点。
我对这句话的理解是:NOP+所使用的技术架构,点到点的能力,会逐步扩展到换电、泊车、城市场景中。是用同一套技术框架,来跑通不同的场景。
任少卿还提到了蔚来在这套统一的硬件、软件架构下,迭代的优势。
NT2平台使用了7颗800万摄像头、4颗300万摄像头,1颗激光雷达。蔚来会把传感器的全量数据做采集,不做降分辨率,也不做抽取,而是把一个片段的所有数据都拿回来,能在芯片上做完全的encoding。
得益于4颗Orin X所提供的硬件能力,蔚来是少数能做到全量+实时闭环的品牌,这也会影响到云端的快速迭代。
换电是蔚来独有的场景,从二代换电站开始,车辆能通过自动泊车完成换电,车主无需下车,全过程不需要换电小哥介入。
而NOP+ 要把换电体验再升级,这就是领航换电。让车子能自己开进服务区,完成换电,再自己开回高速公路。其实能在服务区跑,就等同于低速的城市NOA了。
而与泊车相关的,也会升级到代泊换电,允许车主下车,去上个洗手间。车子完成换完电后,还能停到车位等车主返回。从技术角度看,这已经符合低速L4所定义的场景。
但以上功能何时才能落地?官方从未明确讲过。
我大胆猜测:蔚来NOP+正式发版时,底层就会切到BEV架构,领航换电、融合激光雷达的「占用网络」也会落地,时间大概率会早于7月1日,因为其他家都加速了。
李斌倒是在某个车主活动中提到过:6月份NAD会小范围内测。
谁是第五家?
除了上面4个品牌,谁会是国内落地的第五家?
上海车展之前,坊间传出了特斯拉FSD beta在国内开启测试的消息,但除了这条消息本身,大家并没有发现其他蛛丝马迹。
“我们都希望特斯拉能进来,这样就真能比试一下了”小鹏和华为的智驾团队,都表达过类似的看法。
大疆车载
4月2日的电动汽车百人会上,大疆车载负责人沈劭劼介绍了大疆的领航驾驶辅助解决方案,覆盖5000到15000元的成本区间。
其中「记忆行车」可以看做是城市NOA的轻量化替代方案。通过学习一次,就能获得单线路、城市点对点的驾驶能力。
这套方案,通过「惯导立体双目摄像头」就能生成带有距离信息的稠密点云,不依赖激光雷达在BEV中做4D真值的自动化标注。
坊间传闻,大疆的BEV工程化落地很早就做了。
「记忆行车」完全不需要底图,SD底图都不需要,只需要打通车机导航的接口。通过自学习一次,这套系统就能完成路径记忆、给道路打标签的工作,其原理很像是无人机的返航功能。
大疆车载的工程化能力很强,但能不能成为第五家,取决于定点车型的进度。
智己与Momenta
上海车展前,智己正式发布了高速NOA,并在发布会上宣布,年内公测城市NOA,Momenta提供了算法解决方案。
我们在活动上体验的高速NOA,是一套纯视觉+毫米波的方案。其综合能力与友商的激光雷达方案接近,这让我非常惊讶。
Momenta的技术能力被行业公认,但却一直开花,未曾结果。
上汽、广汽和比亚迪都跟Momenta有着千丝万缕的联系。但直到智己高速NOA落地之前,大家都没摸过他家的量产方案,所以城市NOA何时公测,要看Momenta的工程落地进度了。
除了上述两家,魏牌与毫末智行,上汽飞凡都有机会成为第五家。由于篇幅的关系本文不再展开了,留个悬念吧。
我不得不感叹,2023年只过去了4个月,城市NOA就卷出了新高度,并且还在螺旋上升。这是属于中国辅助驾驶的iPhone时刻!
内容由作者提供,不代表易车立场






