2.48万
看了很多媒体对麋鹿的解读,感觉并没有讲到真正的点上,把麋鹿测试去等同于操控表现?其实是不对的。
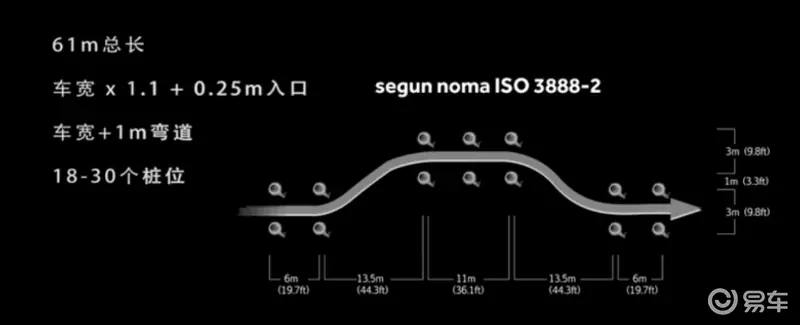
现行麋鹿测试标准
现在我们所谓的车辆麋鹿测试,其实是基于现有法规规范,设定装距的车辆紧急避让性能的测试,如国外媒体KM-77,就倾向使用ISO-3888/2,而部分美系主机厂,还会参考elk-test,VDA标准,或者转向机器人的测试。

转向机器人:
麋鹿测试的根本就是紧急双变线测试,用于考察车辆在紧急避让时,车辆的通过车速,横摆角,侧偏角,甚至车轮离地/脱圈的控制,属于车辆主动安全性能中,比较综合且苛刻的项目之一。
麋鹿测试的历史及发展
麋鹿测试起源于80-90年代的北欧,地广人稀、空气清新、水分充足、资源丰富、得天独厚的地理环境,该地区的野生动物资源尤其发达,这也带来了一系列道路行车安全的问题:由于突然在马路横穿的动物,驾驶员下意识的快速输入方向转角进行避让,由于当时ESC产品并未大批量普及应用,车辆极易在这种极端动态中出现甩尾,甚至翻车的风险,故工程师们开始着手通过ESC控制和底盘性能的优化,来提高车辆极端动态的稳定性和循迹性。除了我们熟知的麋鹿双变线工况,还有紧急单变线,鱼钩转向等等类似的工况,亦会对车辆操控性带来巨大的挑战。
在历史早期车型,因为ESC甚至ABS系统的未普及(不是当时不想,这东西当时又大又重,成本还尤其高),车辆紧急操控的性能全部由底盘本身来实现,比如在我们参考一台车底盘的KC报告中,有一项“不足转向度”的性能指标,如果不足转向度数据良好,就意味着车辆“转向过度”的趋势越小,在高速驾驶时,更容易出现“转向不足”的动态。这对于赛车或者高性能车并不一定友好,但是对于家用车来说,转向不足带来的风险远比转向过度小,也更容易被普通驾驶者接受。
而到了90/00年代之后,随着ESC产品的日趋成熟可靠,ESC产品的装机量也逐步提高,车辆对诸如麋鹿测试等极端操控的性能测试成绩也大大提升。
但媒体或大众对其性能的理解还存在一定的误区,麋鹿测试的意义并不仅仅是通过车速来体现底盘的操控性,恰恰相反,通过车速只能体现“在可接受的”车辆动态下的车速,换句话说:通过法规限定的车辆行驶区域,其着重考量的应该是车辆在行驶范围内的稳定性,如车辆横摆角/侧偏角的收敛,是否存在脱圈/侧翻的风险等等情况。
每台车的轴距/轮胎/质心高度/定位并不同,如偏重舒适和燃油经济型的SUV,在面对低重心的跑车面前,一定存在着先天的劣势,为了油耗和舒适性会偏向更窄滚阻更低更软的轮胎,还有为了舒适性阻尼偏低的减震器或刚度偏低的弹簧,在麋鹿测试这种工况横向对比并不公平,不能说通过车速低其底盘的操控性一定会差。另外除了底盘本身特性,ESC的标定在其中也起着非常重要的作用。比如正弦停滞试验,其考量的主要是车辆横摆角的收敛(车辆稳定性),而不是通过车速本身。
电子稳定系统ESC在麋鹿测试工况中,其本质还是通过车辆轮端的制动,给车辆产生力矩和降速的效果,抵消非预期的车辆侧偏角和横摆角出现。其中传统的ESC主要还是通过后馈控制:通过前期的基础标定,得到车辆的转向比特性(steering-ratio),特征车速(characteristic speed)等特性后,ESC可以基于阿克曼转角几何,计算此时出车辆理论的侧向力大小(ay)和横摆角(yaw),如车辆出现甩尾,再通过车辆外部传感器如轮速(wss),加速度传感器(ax/ay/yaw-sensor)进行车辆实际动态的对比,来决定此时是否需要ESC介入。
如果车辆出现转向过度的情况,通过主动增压在外侧前轮进行制动,产生与失控相反方向的力矩,车辆出现推头,在内侧后轮进行制动,产生与转向输入相同的力矩。而目前更先进的ESC电子稳定系统,还会加入“前馈”控制的概念,因驾驶员快速的转角输入,在车辆传感器还未出现偏离预期动态发生时,就通过ESC进行介入干预,使得控制更早更及时,比如在针对高质心的车辆时,ESC还会有额外的“防侧翻”功能。
如果车速达到一定门限且驾驶员有意图快速大角度的转向输入时,ESC会在车辆还未出现侧滑情况下,就通过更高制动压力的建立,首要降低车辆的当前车速,从而降低车轮侧向力矩,减少脱圈/翻车的风险。大大减少制动带来的不适感,结合后轮转向/可变阻尼减震器/主动防倾杆或电子限滑差速器等零部件进行结合,在不需要通过制动干预的情况下,调用减震器/主动防倾杆改变前后轴的刚度,抑或是调用后轮转向角度,在甩尾时主动提供“前轮同向”的角度,减少侧偏角度等。其结果就是在驾驶员还未察觉车辆失控时,就稳定了车辆的动态,大大提高了舒适性。
麋鹿测试结果的意义
But!“麋鹿测试”仅仅就是“稳定性控制测试”(Stability Control Test)的代名词,也并不等于绝对的操控。
麋鹿测试本质只是为了测试车辆在极限情况下的稳定性,说明车辆急转弯时的稳定性更好,但不能通过成绩来直接反映操控好坏,这只是汽车安全性的一项基础测试,操控可以联系到动力总成的响应是否灵敏且线性,变速箱响应是否迅速且平顺,转向输入是否精准且灵敏,制动力是否线性且有信心,然而有些媒体直接将麋鹿测试和操控甚至底盘性能拉上关系的做法,显然是不够客观的。
一些麋鹿测试的现状
比如TNGA架构的新RAV4进行麋鹿测试结果非常不理想。其在设定的麋鹿测试场地的测试最高通过时速仅为68公里每小时。更糟糕的是同时车辆也出现了车轮离地的问题。
新RAV4已经不是第一个“栽”在这个测试的产品了,奔驰A,大切诺基,保时捷Mancan,日产junk-r等车型都出现过类似的问题,而麋鹿测试更深远的影响其实在于,它让民众对车辆稳定性的关注会越来越高。
关于近期UNI-K的麋鹿测试,因为国内某媒体发现其车辆在大动态麋鹿测试和紧急制动时出现了车轮离地的情况,就有了偏向性的评价,这其实也是不够客观和全面的。
极端动态过程中车轮离地的问题确实可能让人感到一丝担忧,但是多次看视频回放,我们可以发现悬架压缩到极限,车轮离地后的侧翻趋势并没有变得明显,而是保持了这样的一个姿态进行了转向。悬架的支撑刚度与车辆底盘的设定硬朗与否是相关的。幸运的是,在这样姿态下,UNI-K的麋鹿测试通过车速依然很快。我们可以这么理解,UNI-K在这次的测试中整车的ESC标定和轮端设定其实并不差,底盘悬架部分则走的是舒适取向路线。往泛了说,麋鹿成绩其实还是工程标定的取舍在实际测试中的具象展现。
结论
对于麋鹿,不应该谈鹿色变:麋鹿测试的结果只是在某一个场景下的一个紧急避让的性能,它并不能完全地体现车辆的性能。即便成绩差其实也可以通过很多的方式进行优化,例如在后期通过改变车辆的一些关键参数部件。并且在电动车开始大行其道的今天,电动车过麋鹿中的动能回收还能帮车辆迅速降速,成绩反而还更有优势,但实际它能证明电动车操控会更优于燃油车吗,显然不行。
当然,麋鹿的成绩和过程状态自然有其意义所在,但唯麋鹿论略显片面,综合来看各方面的指标,才是最合理的思维方式。
标签: 麋鹿测试
内容由作者提供,不代表易车立场






