1052
AEB即自动紧急制动(Automatic Emergency Braking),其通过雷达、摄像头共同监测前方车辆以及行人情况,若探测到潜在碰撞风险,系统将采取相应预警及制动措施,从而避免发生碰撞或减轻碰撞损害程度。
作为一项重要的ADAS主动安全功能,AEB近年来配置率不断提升,未来有可能成为标配。
01 AEB工作过程
AEB系统的主要功能包括预碰撞报警PCW(Predictive Collision Warning)、紧急制动EB(Emergency Braking)和行人保护PP(Pedestrian Protection)三大部分,其工作过程见图1。
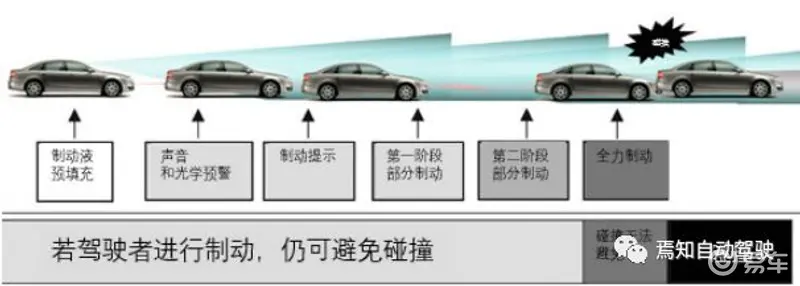
图1 AEB工作过程示意图
02 AEB功能
预碰撞报警PCW、紧急制动EB和行人保护PP三部分所包含的子功能见下表1。

上表中各项子功能的目的及工作机理见表2。
03 AEB硬件架构
AEB作为一项ADAS功能,其硬件包括传感器、控制器与执行器三部分,具体见图2。
图2 AEB系统组成
1) 传感器
目前AEB主流方案采用的环境感知传感器为毫米波雷达和摄像头:毫米波雷达通过对目标物发送电磁波并接收回波来获得目标物体的距离、速度和角度;摄像头需要先进行目标识别,然后再根据目标在图像中的像素大小来估算目标距离。具体配置方案有三种,见表3。
三种配置方案的性能对比见图3。
图 3 AEB传感器配置方案性能对比
2) 控制器
AEB控制器目前多集成在传感器内部(多为毫米波雷达),随着智能驾驶技术的不断发展,AEB控制功能将逐步由域控制器承担。
3) 执行器
目前AEB的执行器均为ESC系统,随着EHB系统的逐步量产(博世ibooster),将会成为新的AEB执行器,并缩短执行器相应时间,提升AEB性能表现。
04 AEB设计思想
正面碰撞防护系统是指针对纵向交通事故开发的一系列驾驶辅助系统的统称,AEB属于其中的部分功能,具体见图4。
图 4 正面碰撞防护系统
目前的技术条件下,AEB系统的设计用途不是保证车辆不会发生追尾事故,而是起到响应辅助及应急辅助的作用,其设计思想如下:
一方面,在驾驶者无法通过自身能力避免碰撞时通过系统干预降低事故的严重程度;另一方面,通过降低车速为驾驶者赢得更多时间,从而采用变道等措施避免碰撞。
此外,AEB的设计中还必须考虑到驾驶者对危险性的主观感受,避免因频繁制动而导致客户抱怨。当然,在环境较为简单的低速情况下,AEB系统通常还是能够将车辆刹停来避免碰撞的。
下图5概括了AEB的设计思想。
图 5 AEB触发时间示意图
标签: 详解
内容由作者提供,不代表易车立场





