3010
1、车载 SoC 芯片基本介绍
1.1 车载 SoC 芯片定义
随着汽车智能化水平的提升,整车 EE 架构已经由以前的分布式 ECU 架构升级到集中式域控制器架构,并继续向中央集成式架构方向演进。在分布式 ECU 架构阶段,MCU 是计算和控制的核心;在集中式域控制器架构阶段,传统 MCU 芯片已经无法满足大量异构数据的吞吐能力和更快的数据处理能力的需求,因此, 数据传输效率更高、算力更大的 SoC 芯片 便成为域控制器主控芯片的必然选择。
1)基础定义
车规级计算芯片按集成规模可以分为 MCU 和 SoC 两类。其中,MCU 也被称之为「单片机芯片」,内部集成有处理器、存储器、输入/输出接口和其他外设,常应用于控制任务简单、实时性较高的嵌入式系统。车载 MCU 常跑的操作系统有 AUTOSAR CP 和 FreeRTOS,通常不支持运行高复杂度的操作系统。
SoC 芯片为系统级芯片,相比 MCU,内部集成更多的异构处理单元,结构设计更为复杂,处理和计算能力也更强,适用于多任务处理以及计算任务更复杂的应用场景。车载 SoC 可以跑更复杂的操作系统,包括 QNX、Linux、Andriod 和 AUTOSAR AP 等。
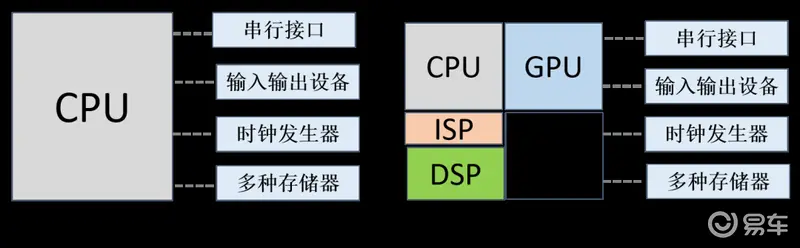 MCU 与 SoC 内部结构对比示意图
MCU 与 SoC 内部结构对比示意图
2)硬件构成
车载 SoC 芯片内部通常包括以下几大模块:处理器、存储器、外设 I/O 等。
A.处理器
车载 SoC 芯片内部的处理器通常包括以下几种单元模块:
B.内部存储器
C.外设 I/O
1 .2 车载 SoC 芯片性能要求
1)重要参数指标
衡量车载 SoC 芯片的性能,需要从 AI 算力、CPU 算力、GPU 算力、存储带宽、功耗、制造工艺等多个维度进行综合考量。
a.AI 算力 : 通常是指 MAC 指令(乘积累加)的运算能力。MAC 指令操作本身与数据类型强相关,在不同数据精度条件下,测出的 AI 算力会存在比较大的差别。企业平时宣称的算力一般是指该芯片运算能力的理论峰值,单位用 TOPS 来表示,一般默认是以 Int8 作为算力量化标准。
但我们也不能只看表面的理论算力数值。在特定使用场景下,大家更关心的是芯片真正的有效算力是多少,即芯片的「算力利用率」。以智能驾驶应用为例,SoC 芯片的实际算力利用率会因为图片分辨率、网络结构差异等原因而有所不同。
b.存储带宽: 数据在处理过程中需要不断地从存储器单元「读」数据到处理器单元中,处理完之后再将结果「写」回存储器单元。数据在存储器与处理器之间的频繁迁移将带来严重的传输功耗问题。有业内人士提出,AI 运算 90%的功耗和延迟都是由于数据搬运产生的。
芯片的存储带宽由两方面决定,一是存储器本身,二是芯片的内存通道数。 存储带宽的大小决定数据搬运速度的快慢和搬运次数的多少。因此,存储系统带宽的大小在一定程度上也决定了芯片真实算力的大小。
 常见芯片存储带宽信息梳理(信息来源:佐思汽车研究、公开资料整理)
常见芯片存储带宽信息梳理(信息来源:佐思汽车研究、公开资料整理)
c.功耗: 包括动态功耗和静态功耗。动态功耗是因为信号值改变带来的功耗损失,由两部分组成:开关功耗和内部功耗。静态功耗是设备还在上电状态但是没有信号值改变时消耗的功率。
芯片的功耗与硬件架构、布局布线、工艺制程、算力大小等因素都有关系。其它条件相同的情况下,采用的工艺制程越先进,芯片的功耗就越低;同理,算力越大的芯片,功耗也会越大。功耗过大意味着会产生更大的散热,可能必需安装水冷系统,从而增加整体 BOM 成本。
2)车规级要求
按照日常生活中的应用场景进行划分,芯片大致可分为消费级、工业级、车规级三大类。应用场景不同,芯片在设计、生产、认证等环节的目标设定和实现手段上都会存在区别。相比于消费级和工业级,车规级芯片的工作环境更恶劣、出错容忍率更低、使用寿命要求更长、供货生命周期更久等等。
不同应用领域芯片的基本性能要求对比(信息来源:公开资料整理)
整体来看,车规级芯片具有高可靠性、高安全性和高稳定性的特点。车载芯片需要经过一系列严格的测试认证,确保其达到车规级的相关要求,方可投入到量产。芯片车规认证标准通常包括以下三个维度的管控:质量管理体系认证 IATF16949、 可靠性标准 AEC-Q100 和功能安全标准 ISO 26262。
1.3 应用场景
目前,车载 SoC 芯片主要面向两大应用领域: 智能驾驶和智能座舱 。虽然现阶段座舱 SoC 芯片和智驾 SoC 芯片尚处在独立发展阶段,但随着整车架构向更集中的跨域融合架构演进,以及车企在架构设计和软件开发能力上的不断提升,智能座舱和智能驾驶的融合也将逐渐由上层应用融合过渡到下层的硬件融合。与此同时,车载 SoC 芯片也必然会随着两者融合的变化而进行迭代升级,届时,舱驾一体 SoC 甚至是中央计算 SoC 将逐渐成为市场的主流产品形态。
1)智能座舱
智能座舱是指在传统电子座舱的基础上进行了升级,使得乘坐体验和交互体验更加智能化。通常,智能座舱可以实现:车载信息娱乐系统+全液晶仪表系统 +抬头显示系统(HUD)+流媒体后视镜(CMS)+车联网系统+车内乘员监控系统(DMS/OMS)等一系列复杂功能。这些功能的实现不仅需要车载计算芯片具备强大的 CPU 算力来提高任务处理能力,也需要更强的 GPU 算力来处理视频、图片等非结构化数据,还需要较大的 AI 算力来满足越来越智能化的人机交互体验需求。
智能座舱功能实现(图片来源:公开网络)
然而,传统的 MCU 芯片已经难以满足智能座舱在各类型算力上的需求,智能座舱控制器所使用的主控芯片已经开始从 MCU 向具有更高集成度、更高算力的 SoC 芯片转变。座舱 SoC 芯片的性能决定了座舱域控制器的数据处理能力、图像渲染能力,从而决定了座舱内屏显数量、分辨率、运行流畅度,舱内交互体验,以及能够整合多少 ADAS 功能。当前,智能座舱的应用场景趋势如下:
舱内显示: 在电子座舱时代,座舱内是小尺寸中控显示屏和物理指针式的仪表盘,现在座舱的中控屏和仪表盘基本都是全液晶数字化大屏,甚至,有的高端座舱还增加有 AR-HUD、流媒体显示屏、后排娱乐屏等,总之,车内显示屏幕呈现多屏化、大屏化和高清化。
舱内交互: 舱内的交互方式变得多样化,传统电子座舱基本是通过物理按键进行交互,现在舱内物理实体按键越来越少,触控式按键、语音交互、手势控制等多模态的交互方式成为主流。
舱驾融合: 座舱和智驾原来基本是相互独立的两个部分,现在座舱和智驾之间的融合越来越多,正逐步由「舱泊一体」向「舱驾一体」演进。
2)智能驾驶
智能驾驶按功能体系应用,通常可分为 行车和泊车 两大类应用场景。
在行车场景下,最开始是采用前视一体机或毫米波雷达模块来实现 L1 等级的基础 ADAS 功能,比如,a。 前视一体机 :实现车道偏离预警 LKW、车道居中保持 LKA、交通标识识别 TSR 等功能;b. 前置毫米波雷达:实现前向碰撞预警 FCW、自适应巡航控制 ACC、车辆自动紧急制动 AEB 等功能;c. 角毫米波雷达:实现盲区检测 BSD、变道辅助 LCA 以及前/后方横向来车碰撞预警 FCTA / RCTA 等功能。
在上述行车场景应用中,控制芯片一般是放置在传感器内部。再往后发展,随着车载 SoC 芯片集成的异构资源日渐丰富,以及核心处理器 CPU/GPU/NPU 算力的大幅提升,传感器中的控制芯片逐渐被剥离出来,集成到独立的控制器中去完成任务。并且,出现了一些 SoC 芯片能够独立完成行车和泊车的传感器数据处理、数据融合等软件算法,即所谓的单 SoC 行泊一体方案。
泊车场景最开始是采用超声波雷达,也称为「倒车防撞雷达」,用于泊车时的防撞提醒。后来,泊车场景中引入摄像头,用于实现倒车影像功能。再往后发展,倒车后视升级到 360°全景环视,通过拼接算法对 4 颗环视摄像头分别输出局部图像进行拼接,最后将拼接好的鸟瞰图传输到中控屏上进行显示。
泊车场景中,泊车算法的集成形式主要有以下几种:
第一种和第三种形式是直接集成到座舱了, 这里便不再展开来讲。 第二种形式正在逐渐消失 ,在国内刚开始流行的时候,主机厂的主流方案是基于 TDA2 等小算力 SoC 芯片来完成。 对于第四种形式,智驾域控制器的芯片方案通常为:n*SoC + MCU 的形式。
~~
~~
内容由作者提供,不代表易车立场





